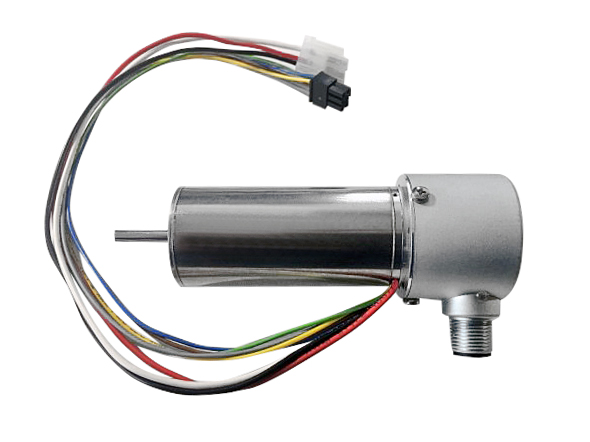
Brush DC motors are the simplest form of a servo motor. The construction of the motor has copper windings on the rotor and permanent magnets on the stator. The windings are energized on the rotor to set up a rotating field which in turn causes the windings on the rotor to rotate. In order to get a rotating field to occur on the motor, rotor current must be switched to adjacent coils or windings. This is done through brushes ridding on commutation segments located on the motor rotor. As the rotor rotates, different coils are energized through the brushes and commutation segments. With the addition of an encoder, such as the KCD Absolute Kit encoder, to the tail shaft of the DC motor, it can be used in a servo control loop and becomes a DC servo motor.
KCD Absolute Kit Encoders